Kinect Calibration¶
Introduction¶
Kinect has been on the market for 8 years. First generation Kinect 1 is based on the theory of Structured Light, and second generation Kinect 2 is based on the theory of Time of Flight. Kinect 1 and Kinect 2 respectively look as in the following picture (cited from imgur).

Theories of how to calibrate a depth sensor has been widely discussed in state-of-the-art publications, such as:
Demonstrations¶
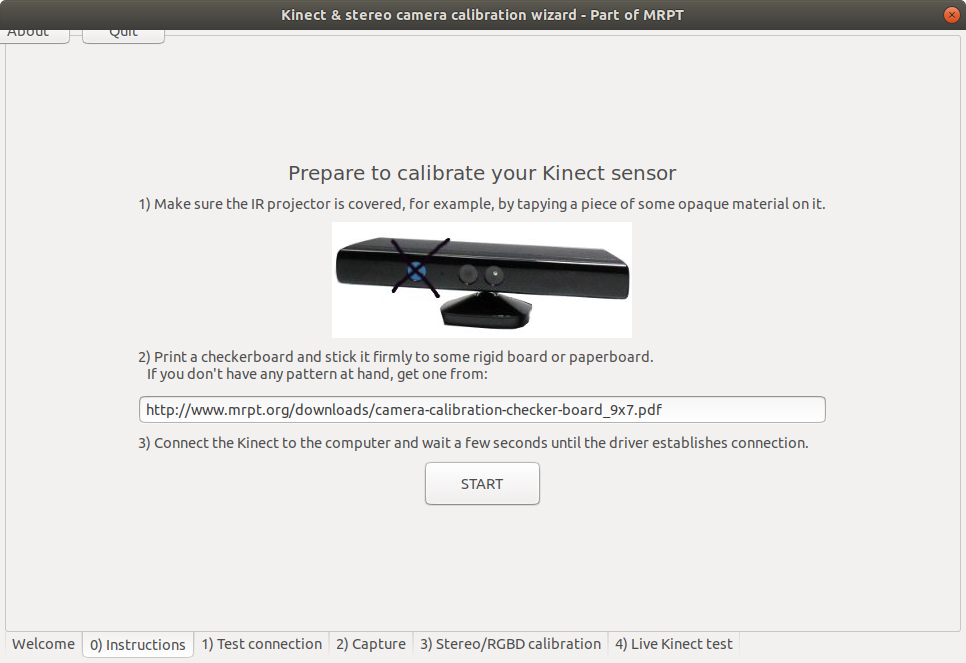
Preparation¶
Here, we’re not discussing the background theories of RGB-D sensor calibration, but using MRPT to calibrate a Kinect 1 directly.
➜ ~ lsusb
......
Bus 001 Device 014: ID 045e:02ae Microsoft Corp. Xbox NUI Camera
Bus 001 Device 012: ID 045e:02b0 Microsoft Corp. Xbox NUI Motor
Bus 001 Device 013: ID 045e:02ad Microsoft Corp. Xbox NUI Audio
Bus 001 Device 011: ID 0409:005a NEC Corp. HighSpeed Hub
......
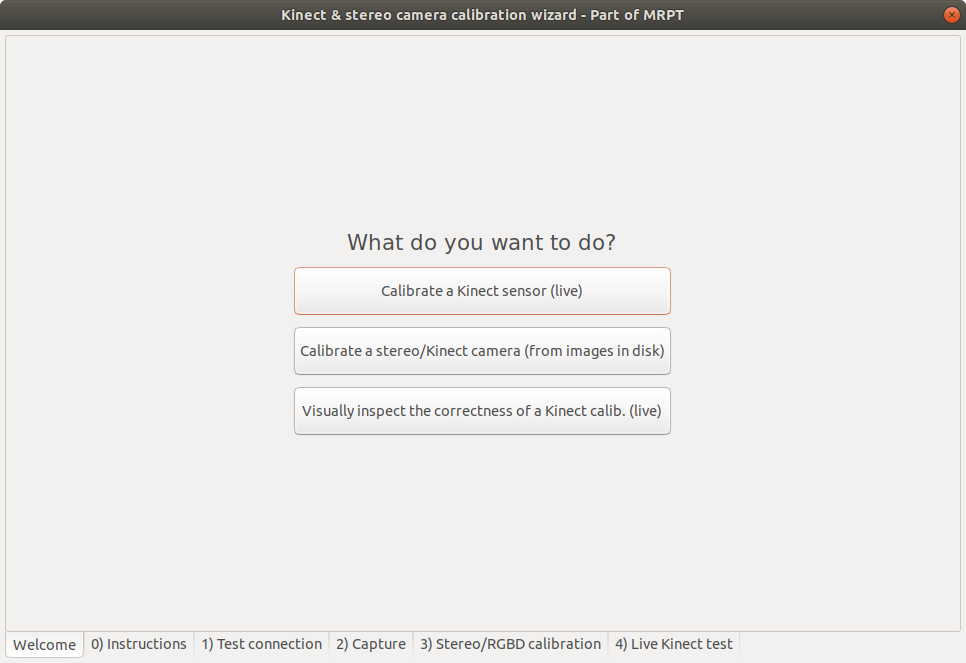
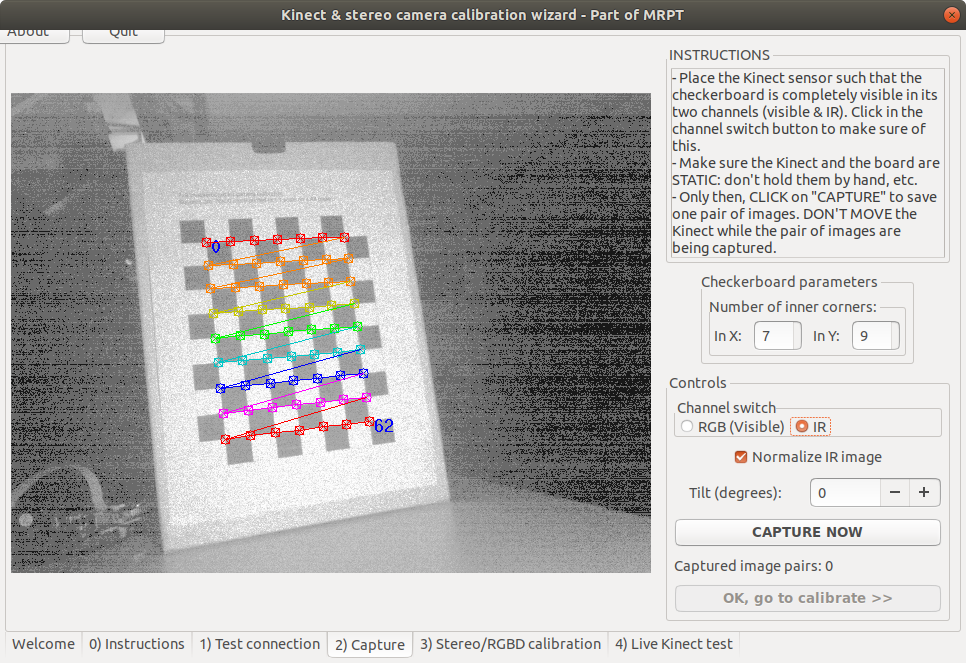
Calibration Kinect Using MRPT¶
Details about how to calibrate a Kinect can be found on MRPT’s tutorial Kinect Calibration.
➜ ~ sudo kinect-stereo-calib
[sudo] password for longervision:
(kinect-stereo-calib:3602): IBUS-WARNING **: 20:07:51.836: The owner of /home/longervision/.config/ibus/bus is not root!
(kinect-stereo-calib:3602): Gtk-CRITICAL **: 20:07:51.956: gtk_box_gadget_distribute: assertion 'size >= 0' failed in GtkSpinButton
......
Calling CKinect::initialize()...Calling CKinect::initialize()...OK
OK
......
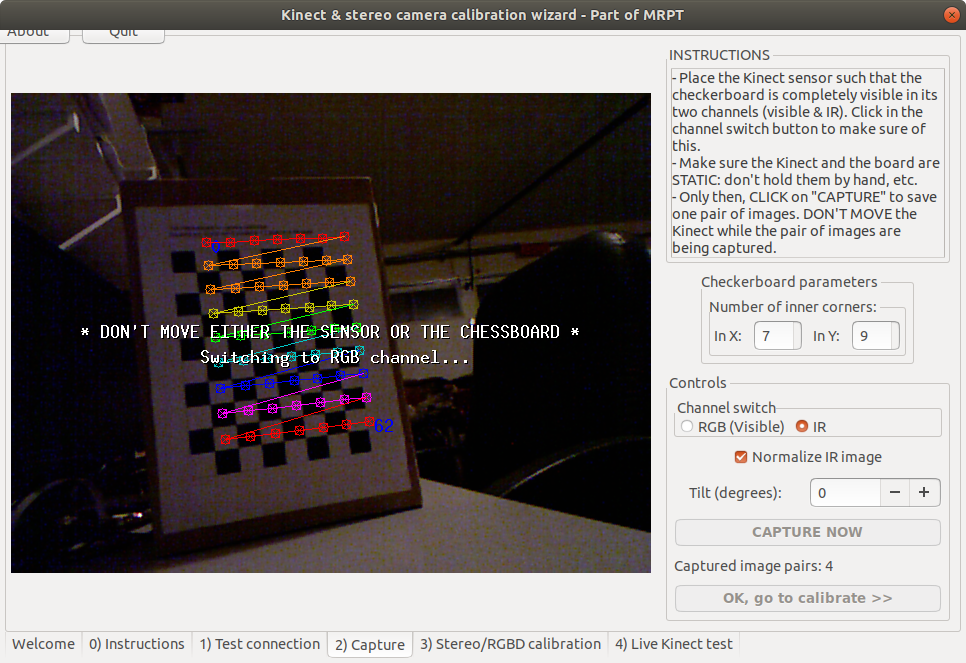
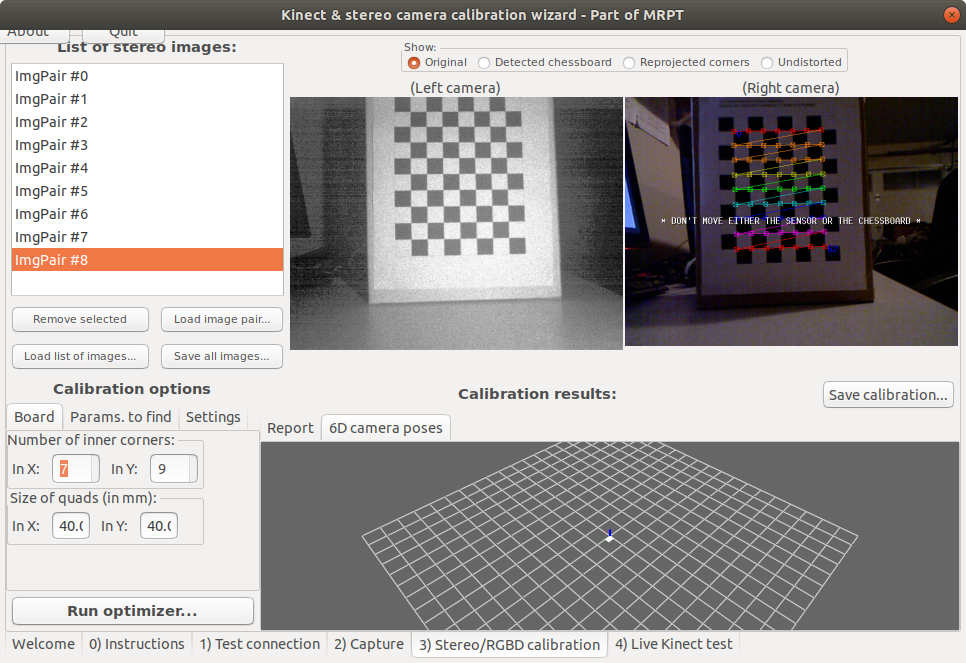
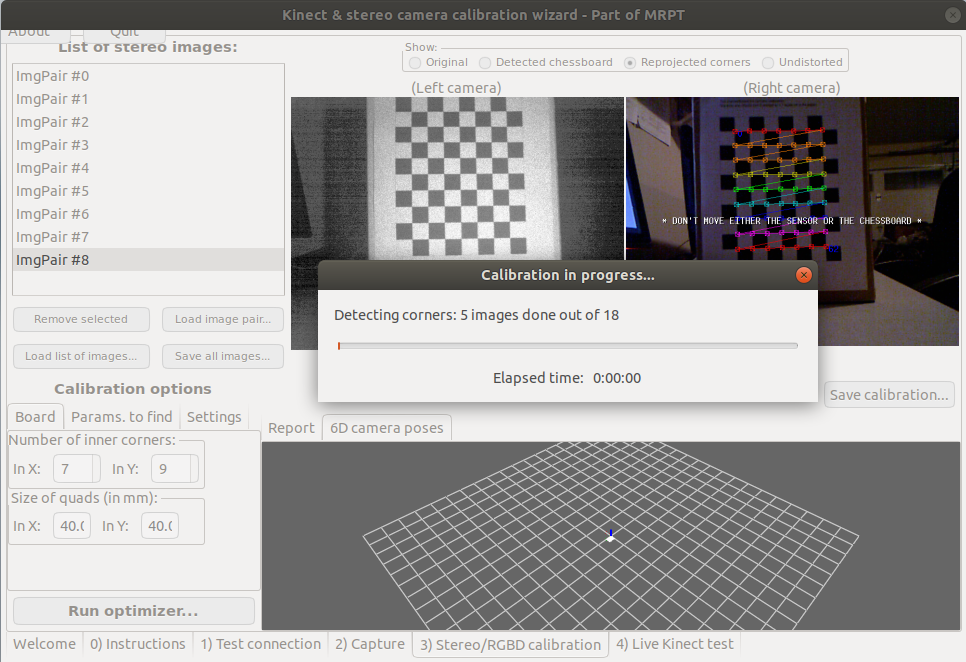
Intermediate Process¶
|
|
|
|
|
|
|
|
Finally, click Save calibration, you’ll save your calibration data into a file with default name calib.ini. For my Kinect 1, I obtained the following result:
➜ ~ cat calib.ini
# Stereo camera calibration report
# Generated by kinect-stereo-calib - MRPT at Tue Jan 28 20:20:36 2020
# (This file is loadable from rawlog-edit and other MRPT tools)
# ---------------------------------------------------------------------
# Left camera (IR/Depth in Kinect) calibration parameters (and 95% confidence intervals):
[CAMERA_PARAMS_LEFT]
resolution = [640 488]
cx = 293.491411 // +/- 0.050
cy = 231.095236 // +/- 0.050
fx = 518.022798 // +/- 0.248
fy = 520.176112 // +/- 0.202
dist = [-8.236128e-07 -5.520703e-07 0.000000e+00 0.000000e+00 0.000000e+00] // The order is: [K1 K2 T1 T2 K3]
# Right camera (RGB in Kinect) calibration parameters (and 95% confidence intervals):
[CAMERA_PARAMS_RIGHT]
resolution = [640 480]
cx = 453.990585 // +/- 0.050
cy = 372.857445 // +/- 0.050
fx = 509.606926 // +/- 0.250
fy = 509.452555 // +/- 0.110
dist = [5.007498e-07 1.003845e-06 0.000000e+00 0.000000e+00 0.000000e+00] // The order is: [K1 K2 T1 T2 K3]
# Relative pose of the right camera wrt to the left camera:
# This assumes that both camera frames are such that +Z points
# forwards, and +X and +Y to the right and downwards.
[CAMERA_PARAMS_LEFT2RIGHT_POSE]
translation_only = [4.149084e-01 1.468625e-01 -9.246930e-02]
rotation_matrix_only = [9.9604425735067e-01 1.5786321022517e-02 -8.7445008246997e-02 ;-8.5960299502565e-03 9.9659520633124e-01 8.2000627965236e-02 ;8.8441764273660e-02 -8.0924574674031e-02 9.9278863185775e-01 ]
pose_yaw_pitch_roll = [0.414908 0.146862 -0.092469 -0.494460 -5.073969 -4.660013] // (YPR in degrees)
pose_quaternion = [0.414908 0.146862 -0.092469 0.998177 -0.040806 -0.044052 -0.006107]
# Info about calibration parameters:
[CALIB_METAINFO]
number_good_cheesboards = 1
average_reprojection_error = 1.190948 // RMSE pixels
cheesboard_nx = 7
cheesboard_ny = 9
cheesboard_square_size_x = 0.040000 // (m)
cheesboard_square_size_y = 0.040000 // (m)
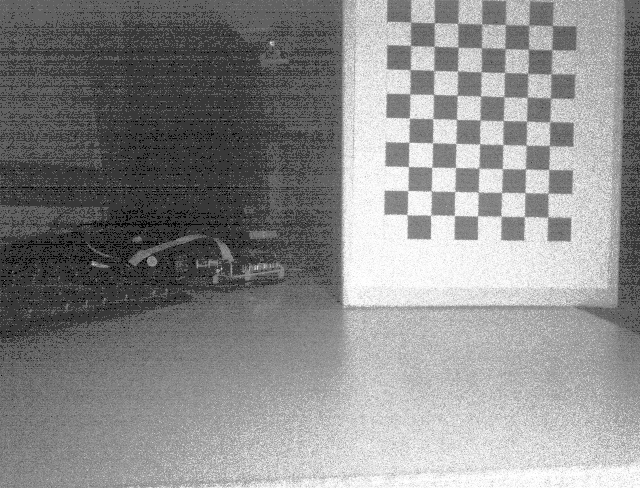
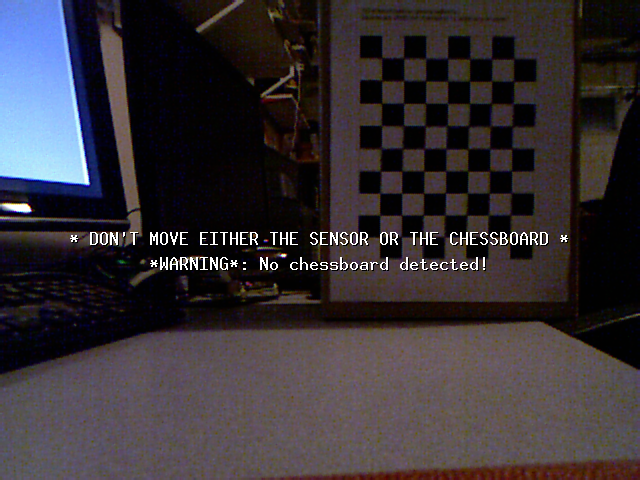
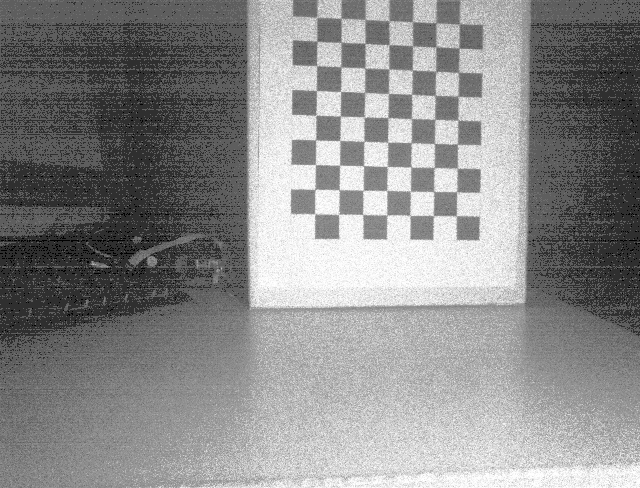
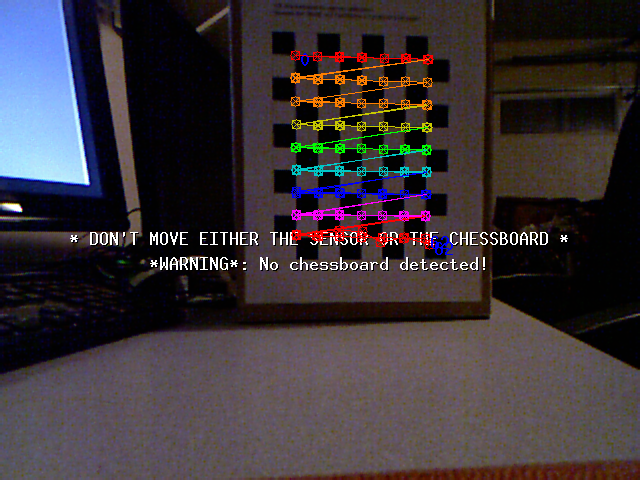
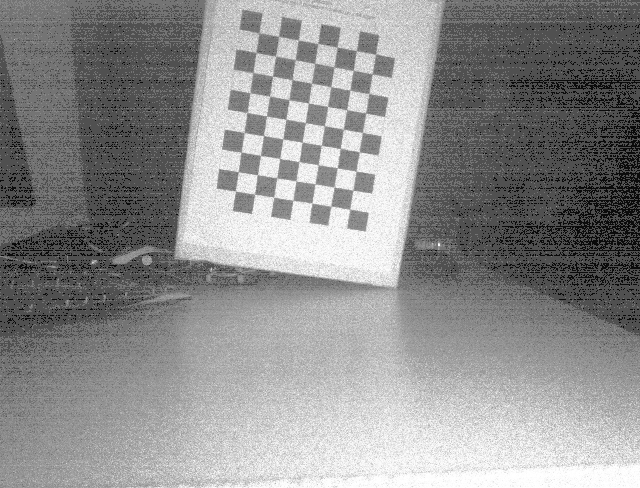
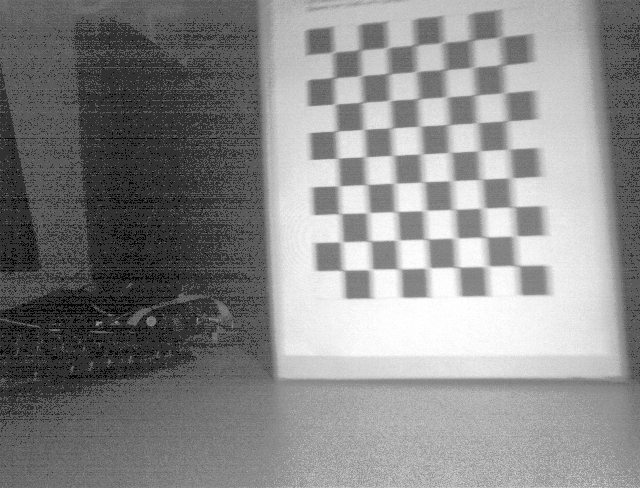
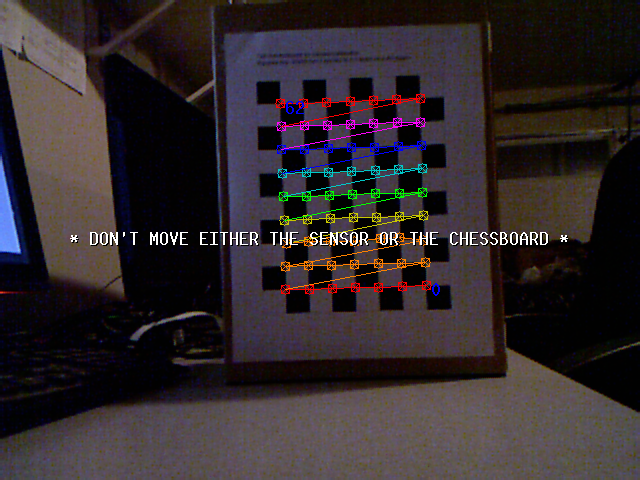
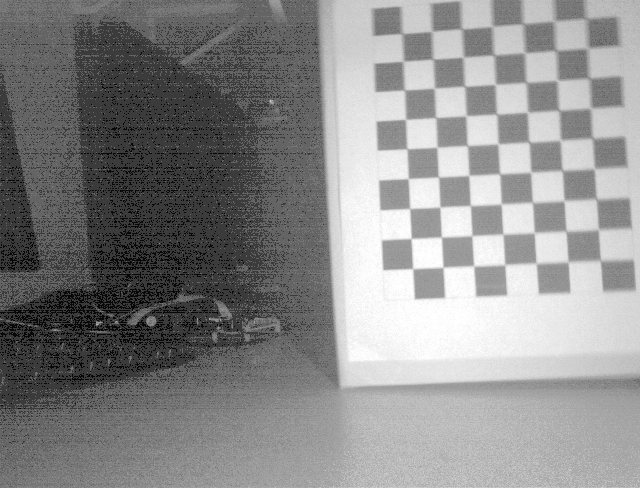
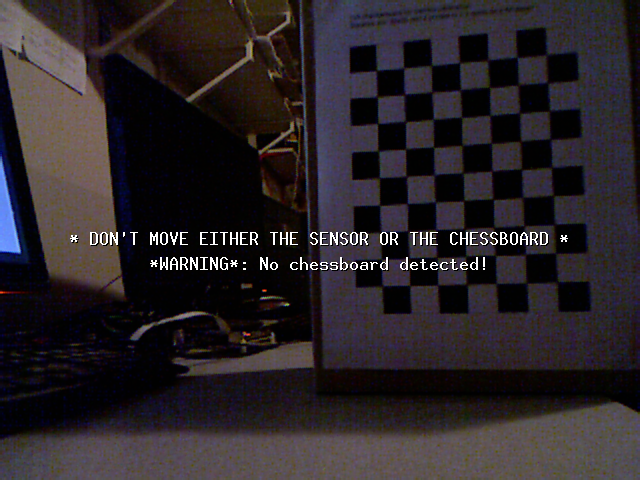
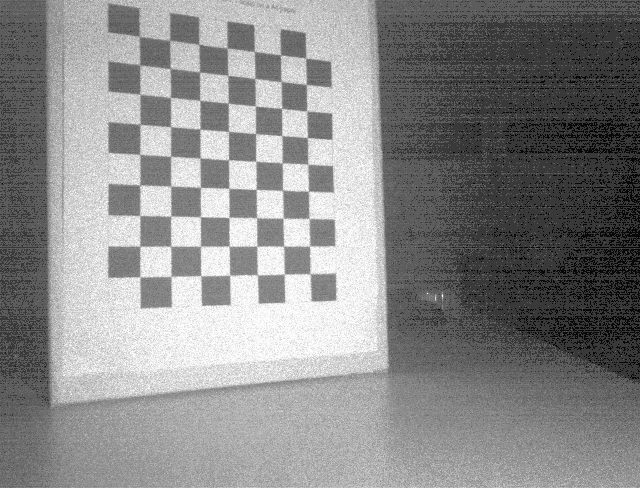
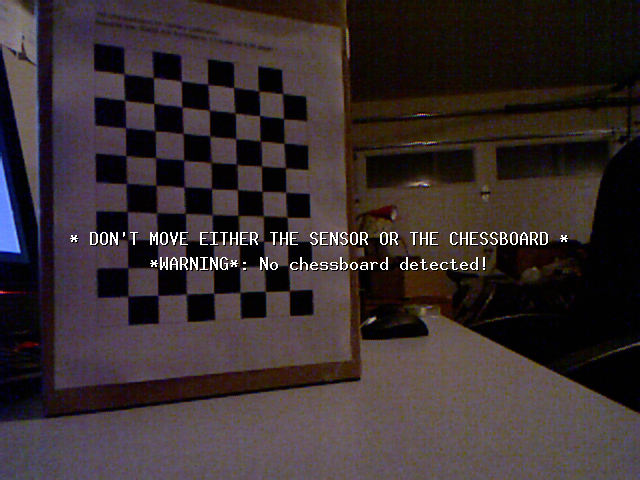
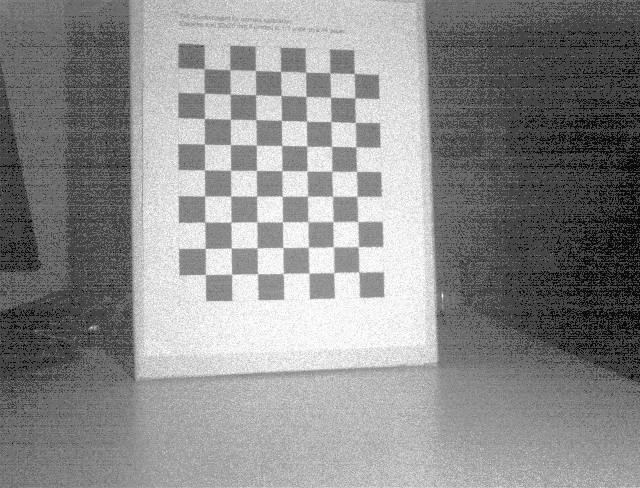
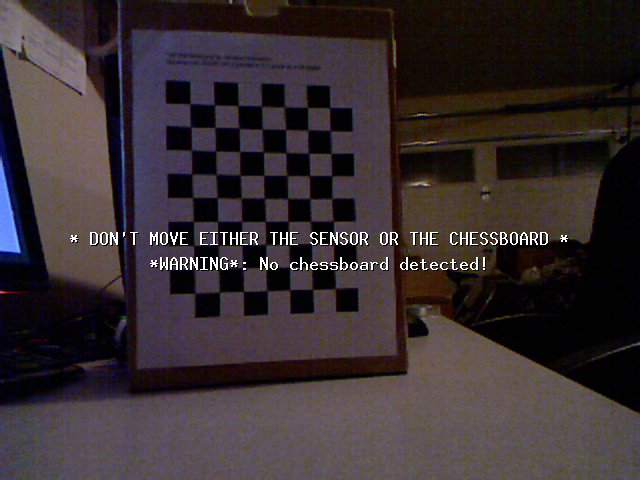
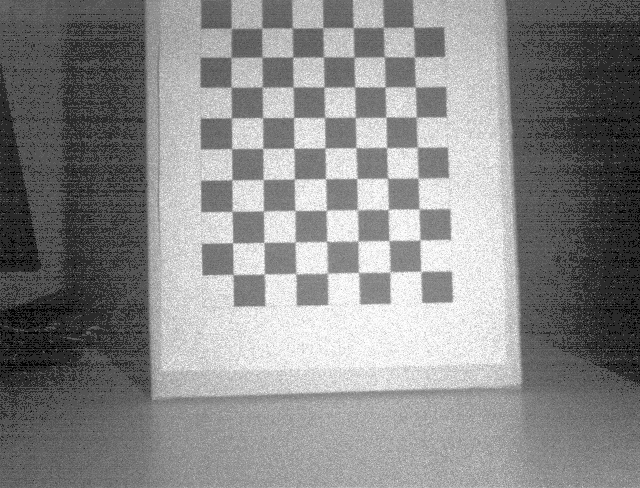
Intermediate Images¶
And, the intermediate 9 pairs of RGB and IR images are respectively captured as:
IR |
RGB |
|
|
|
|
|
|

|
|
|
|
|
|
|
|
|
|
|
|
Assignments¶
- Calibrate one of the following sensors: